Der Antrieb
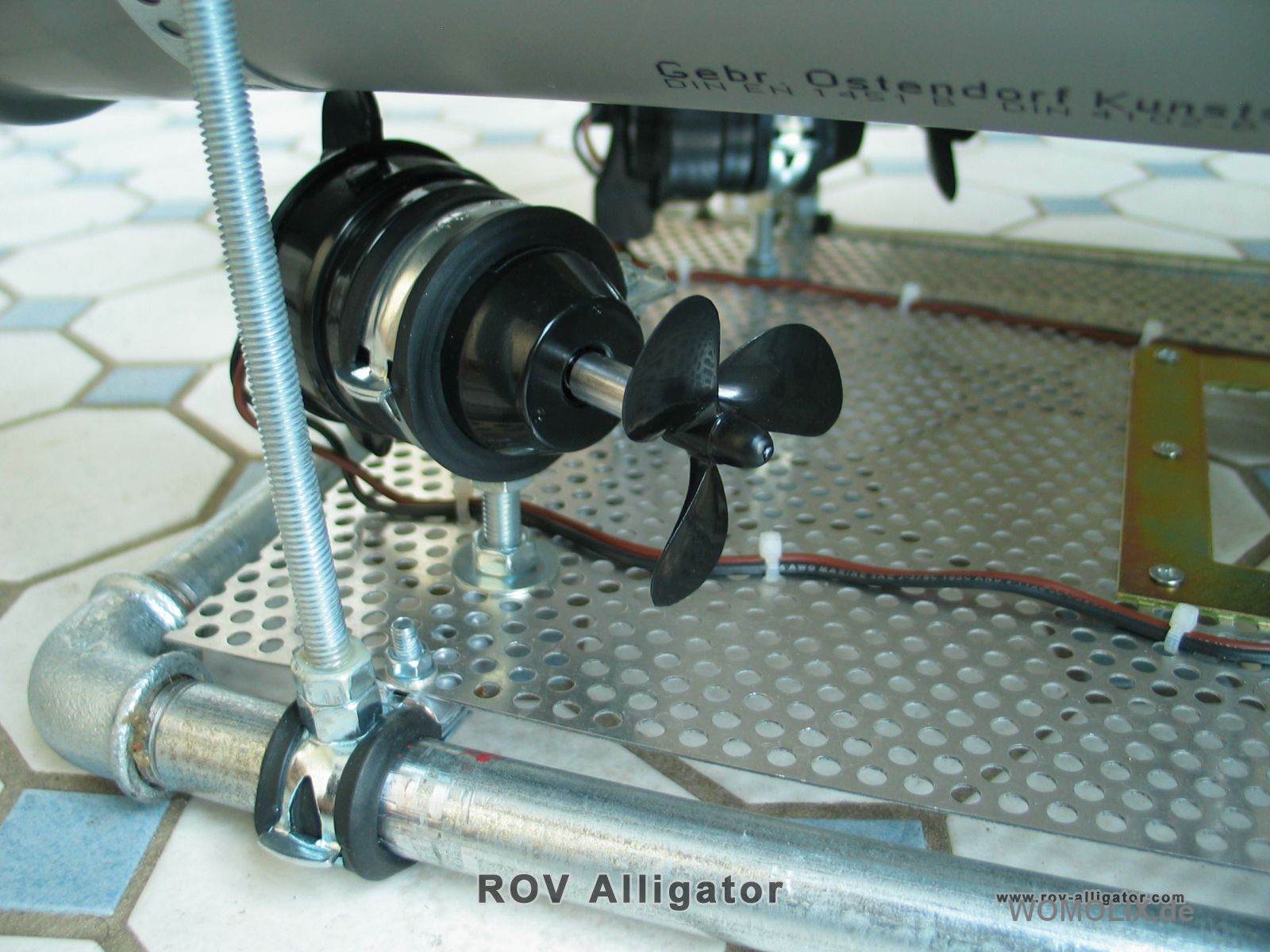
Der Antrieb besteht aus einem Bilgepumpenmotor, einer Aluminiumbuchse mit zwei Madenschrauben und einem 3 flügeligen Propeller aus dem Modellbau. Insgesamt sind 4 Antriebseinheiten verbaut, alle leicht schräg sodass das ROV durch ansteuern der Motoren fahren und drehen kann.
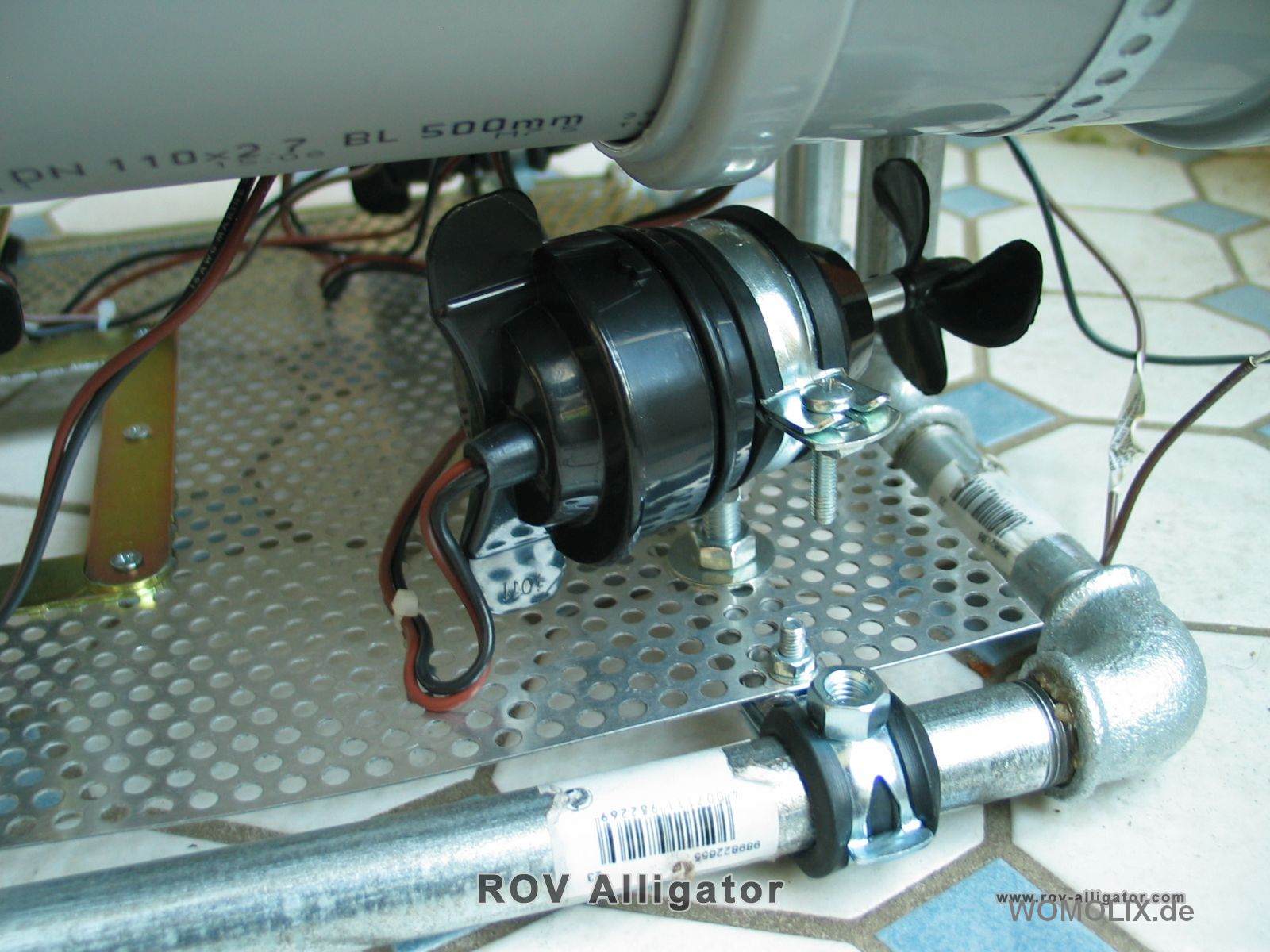
Die Kabel sind von haus aus wasserdicht angeschlossen sodass hier keine weiteren Arbeiten notwenig sind. Die Befestigung des Antriebs erfolgt mit Rohrschellen.

Der Antrieb zum (statischen) Tauchen. Der kleine Propeller wurde nachher noch durch einen größeren ersetzt. Ist das ROV austariert, schwebt also im wasser, kann durch den Antrieb das ROV tauchen oder auftauchen. Sobald der Antrieb stillsteht, wird sich das ROV aber wieder in die Position begeben in der es schwebt. Die Tauchfunktion wurde später noch ergänzt durch ein dynamisches Tauchsystem (in den Auftriebskörpern). Dadurch lässt sich das Luftvolumen im Auftriebskörper reduzieren und das ROV beginnt zu tauchen.
Übersicht
- Inhaltsverzeichnis
- Aufbau des Grundrahmen und der Auftriebskörper
- Propeller für Fahrantrieb & Tauchen
- Gehäuse abdichten
- Elektronik anschließen
- Erste Tests in der Badewanne
- Statisches Tauchsystem
- Software & Steuerung
- Erster Test im See
- Tauchfahrten mit Videokamera